生物反应器对于过程中补料、补酸碱的需求决定了设备对蠕动泵控制精度的高要求,而步进电机控制蠕动泵的方式有多种,用于生物反应器上的通常是脉冲、模拟量和RS-485通讯三种。为了研究这三种控制方式对于蠕动泵控制精度的直观影响,HOLVES专门做了一次对比实验。

本站是霍尔斯(HOLVES)品牌网站https://www.bjholves.com.cn/,提供不同类型的行业资讯、技术知识、解决方案,我们研发和生产了多款新型实验室发酵罐、生物反应器、切向流超滤等设备,满足从实验到工业生产等各个需求环节,欢迎您垂询。
首先,先要了解这三种驱动方式分别是什么?
- 脉冲量:是取值总是不断的在0(低电平)和1(高电平)之间交替变化的数字量。每秒钟脉冲交替变化的次数称为频率。脉冲量主要用于步进电机和伺服电机的位置控制、速度控制、扭矩控制等。
- 模拟量:是连续的电压、电流等信号量,模拟信号是幅度随时间连续变化的信号,其经过抽样和量化后就是数字量。模拟量多是非电量,而PLC只能处理数字量、电量,所以要实现它们之间的转换需要有传感器把模拟量转换成数电量。如果这一电量不是标准的,还需要通过变送器把非标准的电量转换成标准的电信号。此外,还需要有模拟量输入单元(AD)把这些标准的电信号转换成数字信号。
- RS-485:是一种串行数据接口标准,为了扩展应用范围通信能力,增加了多点、双向通信能力,即允许在一条平衡总线上连接最多32个接收器,同时还增加了发送器的驱动能力和通信冲突的保护特性,通过差分传输扩展总线的共模范围。
# 实验测试 #
- 实验设计
测试3种不同驱动方式的蠕动泵在“不同转速下泵出相同体积的液体”和“相同转速下泵出不同液体体积”两种情况下,通过液体体积与设定值的差异去判断步进电机的驱动方式在不同于校准参数时对蠕动泵精度的影响。
- 实验方法及步骤
(1)实验材料
脉冲量蠕动泵(测试前已进行校准)
模拟量蠕动泵(测试前已进行校准)
RS-485通讯蠕动泵(测试前已进行校准)
16号硅胶管
量筒1(量程: 20mL,精度: 0.5mL)
量筒2(量程: 50mL,精度: 1mL)
烧杯
纯水
模拟量蠕动泵(测试前已进行校准)
RS-485通讯蠕动泵(测试前已进行校准)
16号硅胶管
量筒1(量程: 20mL,精度: 0.5mL)
量筒2(量程: 50mL,精度: 1mL)
烧杯
纯水
(2)实验步骤
① 将16号硅胶管扣入蠕动泵滚轮中心,扣上盖板以固定蠕动泵;
② 将硅胶管进液端和出液端均放置在装有纯水的烧杯中;
③ 设定手动转速,将硅胶管内的空气排出,当纯水泵至硅胶管出液端管口时,即下图红线位置,停止泵液;
④ 将出液端放置在合适量程的量筒内,注意不要贴壁,以防液体挂壁影响实验结果;
⑤ 在设备上设置好蠕动泵的转速和目标泵出液的体积后,运行蠕动泵,并记录运行时间;
从表中数据可以看出,一旦改变了转速和泵出量,不同的驱动方式控制的蠕动泵会有不同结果。3种驱动方式中,RS-485通讯方式的控制精度最优,脉冲次之,模拟量的误差最大。
⑤ 在设备上设置好蠕动泵的转速和目标泵出液的体积后,运行蠕动泵,并记录运行时间;
⑥ 泵液结束后,观察并记录实际泵出液的体积;
⑦ 重复以上操作,测试并记录所有蠕动泵的运行数据。
⑦ 重复以上操作,测试并记录所有蠕动泵的运行数据。
- 注意事项
蠕动泵在进行实验前,统一使用16号硅胶管以50rpm的转速泵出20mL的泵出液体积,以进行校准操作。在实验进行过程中,无论泵出液体积出现多少差异,都不可再进行校准操作。读取泵出液体积时,将量筒放在平整的桌面上,使视线与量筒内液体凹液面的最低处保持水平。
- 实验数据
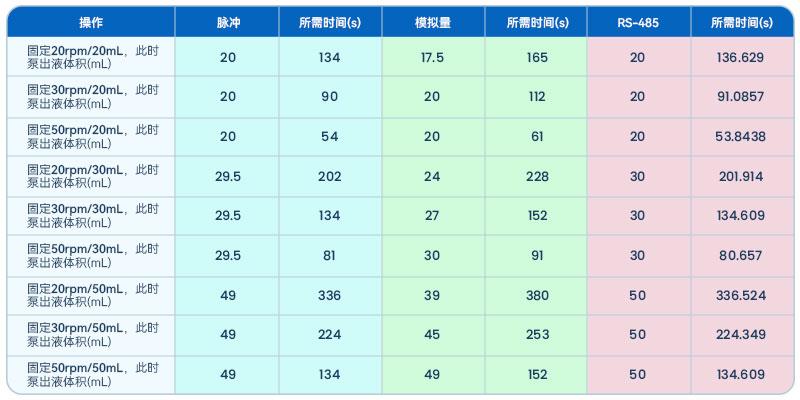
分析实验的数据进行整理,得到下表:
(步进电机驱动精度测试)
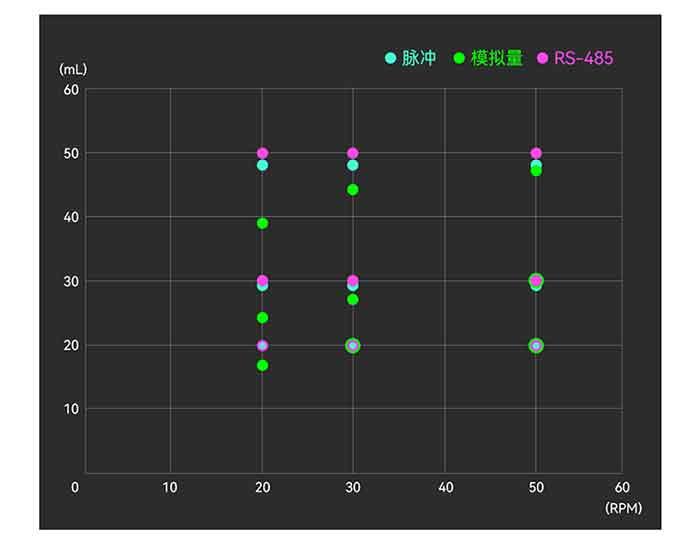
(精度测试散点示意图)
从表中数据可以看出,一旦改变了转速和泵出量,不同的驱动方式控制的蠕动泵会有不同结果。3种驱动方式中,RS-485通讯方式的控制精度最优,脉冲次之,模拟量的误差最大。
RS-485通讯的优点
RS-485通讯方式除了赋予蠕动泵高控制精度外,还具备以下优点:
①系统运行稳定——利用专用通信总线把集中器和主站安全、可靠地连接起来。除非设备接口硬件损坏,或者总线线路断开,否则总线抄表系统会一直保持良好的通信效果和抄收成功率。
②通信速率高——由于使用的是专用的有线通信线路连接,线路上除了通信信号外,再无其他信号。且外来的干扰信号耦合到线路后的衰减很大,所以集中器能以较高的速率与主站通信。
③抗干扰——RS-485总线信道是专用的通信信道,通过在通信线缆上添加的屏蔽,可以有效地保证通信效果,所以具有较强的抗空间干扰性能。
HOLVES的生物反应器在步进电机的驱动方式上已基本更新为RS-485通讯方式,有效地提高了发酵过程中蠕动泵的调控性能。
本站是霍尔斯(HOLVES)品牌网站https://www.bjholves.com.cn/,提供不同类型的行业资讯、技术知识、解决方案,我们研发和生产了多款新型实验室发酵罐、生物反应器、切向流超滤等设备,满足从实验到工业生产等各个需求环节,欢迎您垂询。









